La
conduite automatisée a un impact sur
tous les secteurs de la voiture : entraînement, frein, direction, instruments d'affichage, navigation et capteurs, sans oublier l'interconnexion au sein et en dehors du véhicule.
Une
conception redondante des systèmes essentiels à la sécurité tels que le freinage et la direction constitue un impératif à la mobilité automatisée.
Une
bonne compréhension de tous les systèmes interconnectés nécessaires à la conduite automatisée du véhicule est indispensable.
Une reconnaissance fiable de l'environnement présuppose une
fusion des données fournies par des capteurs fonctionnant selon différents principes.
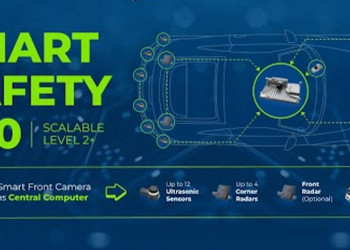
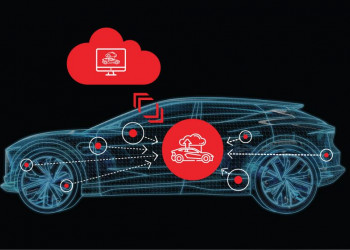
Les composants requis pour automatiser la conduite sont entre autres l'horizon connecté, la direction électrique, l'ESP, l'interface homme-machine, le servofrein, des cartes, un capteur radar, un capteur lidar, des capteurs à ultrasons et un capteur vidéo.
Horizon connecté : Les véhicules automatisés s'appuient sur des informations sur leur environnement qui vont bien au-delà de la zone de détection des capteurs. Ils ont besoin notamment de données en temps réel sur le trafic, sur les embouteillages et accidents par exemple, ce qui nécessite de connecter les véhicules à un serveur. L'horizon connecté permet une prévisualisation dynamique de l'itinéraire à suivre et un ajustement de la stratégie de conduite en conséquence. Grâce à l'horizon connecté, les véhicules automatisés sont capables d'anticiper, ce qui accroît le confort et la sécurité durant la conduite. Les véhicules connectés sont avertis à l'avance de la présence de zones dangereuses, en sortie de virage ou derrière une colline par exemple, et peuvent ralentir plus tôt.
Direction électrique : La direction assistée électrique à sécurité intégrée constitue une technologie clé pour la conduite automatisée. Cette sécurité intégrée permet au conducteur ou à la voiture circulant en mode automatisé de continuer à utiliser les fonctions de direction essentielles en maintenant au moins 50 % de l'assistance électrique dans les rares cas de dysfonctionnement. Cette technologie répond aux exigences de fiabilité définies par exemple par le Ministère américain des Transports et la National Highway Traffic Safety Association, l'autorité fédérale américaine en charge de la sécurité
routière, dans la directive sur les véhicules automatisés (Federal Automated Vehicles Policy).
ESP : Le système électronique de stabilité joue un rôle central dans la conduite automatisée. En cas de transfert de la responsabilité de la conduite à la voiture, les systèmes essentiels à la sécurité tels que le frein sont soumis à des exigences particulières. Afin de garantir une disponibilité maximale en cas de défaillance, une certaine redondance doit être intégrée dans le système à titre de protection. L'ESP et le servofrein électromécanique peuvent s freiner le véhicule indépendamment l'un de l'autre, sans que le conducteur n'ait à intervenir.
IHM : La conduite automatisée modifie la commande du véhicule et nécessite des concepts modernes de communication entre le conducteur et le véhicule. Le conducteur doit pouvoir appréhender et utiliser le système de manière intuitive. Le combiné d'instrumentation doit offrir une flexibilité maximale en matière de traitement des contenus et d'affichage d'une grande clarté. L'affichage tête haute place des informations telles que la vitesse, la navigation et les alertes directement dans le champ de
vision du conducteur. Ces informations viennent se superposer à l'environnement du véhicule de façon à donner l'impression de fusionner à une distance d'environ deux mètres à l'avant du véhicule.
Servofrein électromécanique: Le servofrein électromécanique indépendant du vide répond aux exigences d'un système de freinage moderne. Il est utilisable avec tous les concepts d'entraînement et convient tout particulièrement aux
véhicules hybrides et électriques. L'action sur la pédale de frein est enregistrée via un capteur de course de pédale intégré, puis transmise au calculateur. Ce dernier calcule les signaux de pilotage pour le moteur électrique, qui fait appel à une boîte de vitesses à deux étages pour convertir son couple en la force d'assistance requise. La force fournie par le servofrein est transformée en pression hydraulique dans un maître-cylindre de frein standard.
Cartes : Sans cartes actualisées et à haute résolution, il ne peut pas y avoir de conduite automatisée. Les cartes fournissent aux véhicules des informations sur les conditions de circulation fluctuantes telles qu'embouteillages ou chantiers, qui vont bien au-delà de la zone de détection des capteurs embarqués. Les capteurs radar et vidéo collectent et fournissent des données de trafic en temps réel qui sont importantes pour l'élaboration de cartes à haute résolution destinées à la conduite automatisée.
Capteur lidar : En plus des capteurs radar, vidéo et à ultrasons, certains véhicules automatisés font appel à des capteurs lidar. Les différents principes de fonctionnement des capteurs se complètent parfaitement, permettant une détection fiable de l'environnement par fusion des données. Les véhicules automatisés utilisent ces données pour en déduire leur stratégie de conduite.
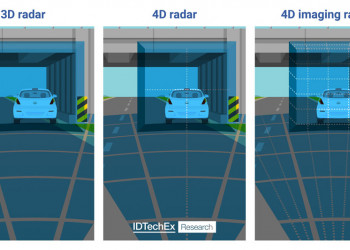
Capteur radar : A une distance pouvant atteindre 250 mètres, les capteurs radar, qui constituent l'un des différents principes de capteurs, fournissent des informations à 360° sur l'environnement qui sont essentielles pour les
voitures automatisées. Le rôle premier des capteurs radar est de détecter des objets et de mesurer leur vitesse et leur position par rapport au mouvement du véhicule dans lequel ils sont intégrés. Via une antenne émettrice, les capteurs radar émettent pour ce faire des ondes radar modulées en fréquence, dans une gamme de fréquences comprise entre 76 et 77 GHz. Ces ondes sont réfléchies par les objets situés en avant du véhicule. La vitesse relative et la distance des objets sont ensuite mesurées grâce à l'effet Doppler et au délai généré par les deux décalages de fréquence entre le signal envoyé et le signal reçu. La position de l'objet peut alors être déterminée en comparant l'amplitude et la phase des signaux radar mesurés.
Capteurs à ultrasons : La conduite automatisée fait appel à des capteurs à ultrasons notamment pour identifier l'environnement proche (jusqu'à 6 mètres) et à faible vitesse, par exemple lors de manœuvres de stationnement. Les capteurs fonctionnent selon le principe du sonar, qui permet par exemple aux chauves-souris de s'orienter. Ils émettent de courtes impulsions ultrasonores réfléchies par les obstacles. Les signaux d'écho sont enregistrés par les capteurs et analysés par un calculateur central.
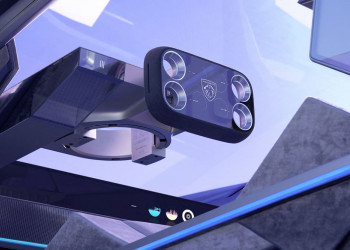
Capteur vidéo : D'une portée de mesure de plus de 50 mètres, la caméra vidéo stéréo fournit des informations optiques importantes sur l'environnement du véhicule. Les capteurs d'images ultrasensibles doivent traiter des contrastes très marqués. La caméra vidéo stéréo capture les objets dans l'
espace, détermine leur éloignement et identifie les espaces libres. Les informations fournies par le capteur sont fusionnées avec des données de capteurs fonctionnant selon d'autres principes pour fournir un modèle de l'environnement destiné aux véhicules automatisés.
Source: Bosch































 Newsletter
Newsletter