Ford teste des
véhicules entièrement autonomes dans des conditions hivernales, notamment sur
routes enneigées. C'est une étape importante dans la stratégie de l'entreprise américaine qui vise à proposer des véhicules totalement autonomes à des millions de clients à travers le monde.
Ford estime que l'avenir de la
conduite autonome ne peut pas uniquement se concevoir pour une utilisation dans des
conditions météorologiques idéales, par temps sec et ensoleillé.
“C'est une chose de conduire une voiture par une météo clémente”, explique
Jim McBride, responsable technique pour les
véhicules autonomes de Ford.
“C'en est une autre de le faire lorsque les capteurs de la voiture ne peuvent pas voir la route parce qu'elle est couverte de neige. La météo n'est pas toujours au beau fixe. D'ailleurs, à peu près 70% des résidents des États-Unis vivent dans des régions régulièrement enneigées”.Les
tests hivernaux ont lieu dans le Michigan, notamment à Mcity, une structure de 13 hectares située au cœur de l'Université du Michigan et qui reproduit un
environnement urbain réel.
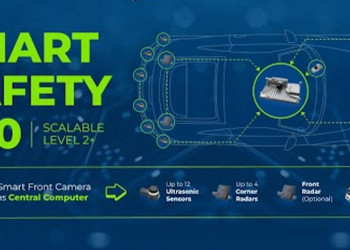
Ford utilise la
cartographie 3D haute résolution et des
capteurs LiDAR pour faciliter la conduite entièrement autonome lorsque les marquages routiers ne sont pas visibles.
Ford considère que la conduite entièrement autonome ne peut pas fonctionner qu'avec le seul GPS, qui n'a une précision que de quelques mètres. Ce qui n'est pas suffisant pour localiser la position exacte du véhicule. Or, pour un
véhicule autonome, connaître son emplacement précis est essentiel. Et pas seulement dans une ville ou sur une route. Le véhicule doit également connaître sa position réelle dans sa voie de circulation, car une variation de quelques centimètres peut faire une grande différence.
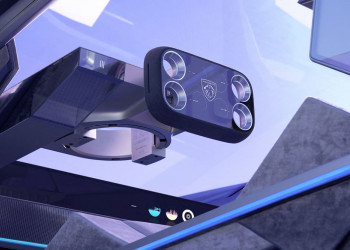
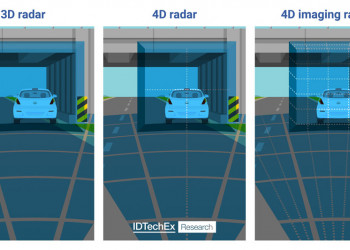
D'autre part, le
capteur LiDAR est beaucoup plus précis que le GPS, actuellement, pour identifier l'emplacement exact du véhicule autonome sur sa voie de circulation, au centimètre près. Le capteur LiDAR émet de courtes impulsions de lumière laser pour permettre au véhicule de
créer avec précision une image 3D haute définition en temps réel de ce qui est autour de lui.
Par temps idéal, le capteur LiDAR est le moyen le plus efficace de recueillir les informations importantes et les métadonnées (donnée associée à l'information recueillie) sur l'environnement du véhicule, en détectant les objets à proximité pour déterminer la meilleure trajectoire possible. Mais sur route enneigée, ou dans un trafic très dense, les capteurs LiDAR et les autres capteurs tels que ceux des caméras ne peuvent pas voir la route. Ceci est également le cas lorsque la lentille du capteur est recouverte de neige ou de saleté.
Les techniciens de Ford et de l'Université du Michigan ont commencé à collaborer pour trouver une solution qui permettrait à un véhicule autonome de
circuler sur une route couverte de neige.
Pour naviguer sur route enneigée, les véhicules autonomes Ford sont équipés de cartes 3D haute résolution, complétées avec des données sur les routes et les informations y afférant, comme les marquages au sol, la signalisation, la géographie, la topographie et les points de repère.
“Les cartes élaborées par d'autres entreprises ne fonctionnent pas toujours dans les paysages enneigés”, détaille
Ryan Eustice, professeur associé à l'Université du Michigan College of Engineering.
“Les cartes que nous avons créées avec Ford contiennent des informations utiles à propos de l'environnement 3D autour de la voiture, permettant au véhicule de se localiser même avec une couverture de neige recouvrant le sol”.Dans des conditions météorologiques favorables - et grâce à des technologies lui permettant de relever automatiquement les panneaux de signalisation, les arbres et les bâtiments -, un véhicule autonome crée lui-même des cartes de son environnement tout en conduisant. Lorsque le véhicule ne peut pas voir le sol, il détecte des points de repères au-dessus du sol pour se localiser sur la carte, puis utilise ensuite cette carte pour circuler avec succès dans des conditions défavorables.
“Les systèmes de sécurité normaux du véhicule, comme le contrôle de stabilité électronique et le contrôle de traction, qui sont souvent utilisés sur les routes glissantes en hiver, travaillent à l'unisson avec le logiciel de conduite autonome”, explique
Jim McBride.
“In fine, nous voulons que nos véhicules autonomes soient en mesure de détecter la détérioration des conditions, puis de décider s'il est sûr de continuer à rouler, et si oui, pour combien de temps”.






























 Newsletter
Newsletter