Equipée d'
un système de conduite autonome, la
Mercedes-Benz Classe S Intelligent Drive expérimentale effectue un parcours autonome
sur une distance de 100 km dans un environnement urbain et interurbain entre Mannheim et Pforzheim. Il s'agissait pour Mercedes-Benz de suivre les traces
(et le parcours sans autoroute) de la pionnière Bertha Benz qui a osé se lancer dans le premier trajet longue distance en
automobile entre ces deux villes il y a de cela 125 ans.
Immergée
dans la circulation dense du XXIe siècle, la Classe S expérimentale a dû
maîtriser de manière autonome des situations de conduite complexes (pour un véhicule à système de conduite autonome) avec feux tricolores, giratoires, sans oublier piétons, cyclistes et tramways.
Dérivé de la
nouvelle Mercedes-Benz Classe S, le prototype a réussi à relier les deux villes de manière autonome.
Le véhicule expérimental Mercedes-Benz a recours
à des techniques proches de celles proposées aujourd'hui de série dans la nouvelle Classes S. Il a été équipé de
capteurs évolués très proches de ceux déjà utilisés dans la production de série de la Classe S et de la Classe E. Les concepteurs de ce vecteur technologique lui ont appris à savoir où il se trouve, ce qu'il voit et comment il est censé réagir de manière autonome. Grâce à son
« pilote routier » hautement automatisé, la
voiture est capable de s'orienter au sein du trafic urbain et interurbain, même très dense.
Par rapport à la version de série de la Mercedes-Benz Classe S, les véhicules testés ont subi différentes adaptations techniques .
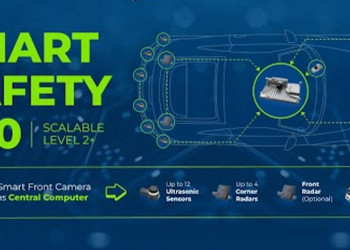
La largeur de base (écart entre les deux objectifs) de la caméra stéréo a été augmentée afin de lui permettre de détecter des objets plus éloignés parallèlement au radar longue portée.
Deux radars longue portée supplémentaires ont été intégrés sur les côtés du pare-chocs avant pour permettre la détection précoce de véhicules arrivant de la gauche ou de la droite dans les carrefours. Un autre radar longue portée surveille la circulation en aval.
Quatre radars de proximité logés aux quatre coins du véhicule améliorent le balayage des zones proches et la détection d'autres usagers de la route.
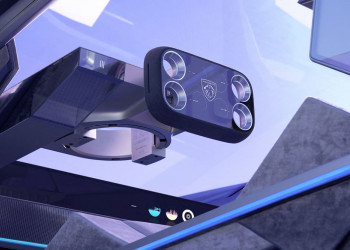
Derrière le pare-brise, une
caméra couleur disposant d'un angle d'ouverture de 90 degrés est affectée à l'observation des feux tricolores.
Une autre caméra est orientée vers la lunette arrière et la zone située en aval. Elle sert à localiser le véhicule dans son environnement à l'aide de caractéristiques connues qui ont été préalablement enregistrées sur une carte digitale. La comparaison entre l'image saisie à l'instant t et celles déjà enregistrées permet au système embarqué de localiser la voiture avec davantage de précision qu'avec le seul GPS.
Pour effectuer le test routier sur l'itinéraire défini, Mercedes-Benz a établi, avec la collaboration de l'Institut de technologie de Karlsruhe (KIT) et de la société HERE, une division de Nokia spécialisée dans la production de cartes numériques et de services locaux,
une carte numérique en trois dimensions du trajet entre Mannheim et Pforzheim adaptée aux besoins spécifiques d'un
véhicule autonome. Outre le tracé de la route, cette carte, qui doit répondre à des critères de précision bien spécifiques, recense le nombre et la direction des voies de circulation, les panneaux de signalisation
routière ainsi que la position des feux tricolores. La disponibilité de telles cartes est une condition nécessaire et indispensable au système de conduite autonome Mercedes-Benz.
Sur la base des données fournies par les capteurs, de la position du véhicule et des informations de la carte numérique, les systèmes présents à bord du véhicule à conduite autonome
analysent l'espace disponible pour circuler et calculent la trajectoire du véhicule. Les algorithmes nécessaires à ces calculs ont été développé par le groupe de recherche Mercedes-Benz en collaboration avec l'Institut des techniques de mesure et de régulation de l'Institut de technologie de Karlsruhe (KIT).
Lors des
essais, la Classe S roulant en toute autonomie était
surveillée par des conducteurs ayant reçu une formation spécifique axée sur la sécurité. En cas de mauvaise réaction du véhicule,
ceux-ci pouvaient intervenir immédiatement et reprendre les commandes de la voiture. Dans la mesure où la circulation réelle n'est pas prévisible et par conséquent qu'aucune situation de marche n'est identique à une situation antérieure, chaque intervention a été documentée par le conducteur référent. Ces informations ont été analysées par l'équipe d'ingénieurs développement qui a complété en conséquence le catalogue de manœuvres du véhicule. Grâce à cette procédure, le vecteur technologique devient capable de maîtriser de plus en plus de situations au cours de son évolution.
Les essais effectués sur le parcours de 100 kilomètres
ont livré des enseignements importants pour la suite du développement des technologies requises.
« Il s'est par exemple avéré que la détection des phases des feux tricolores constituait un véritable défi dans certaines conditions d'éclairage, tout comme d'ailleurs l'affectation correcte des feux à une file déterminée », explique
Ralf Herrtwich, responsable des systèmes de train de roulement et d'
aide à la conduite au sein du service Recherche et Prédéveloppement de Daimler et initiateur dans cette fonction du projet de conduite autonome.
« Nous n'avons pas pour ambition de développer un véhicule capable d'apporter une réponse à toutes les situations. Lorsqu'une benne à ordures bloque la route, par exemple, le véhicule ne doit pas la dépasser automatiquement, d'autant que la visibilité dont disposent les capteurs de la voiture est alors tout aussi limitée que celle du conducteur. Dans ce genre de situation, le véhicule lui repasse les commandes. » Ce
premier succès (sous la surveillance étroite d'un conducteur) dans un environnement urbain et interurbain ouvert à la circulation marque
une étape décisive sur le chemin qui sépare la voiture auto-mobile de la voiture (à conduite) autonome.
Le succès des essais réalisés par Mercedes-Benz sur le trajet historique emprunté par Bertha Benz est le tout dernier résultat de longues années de recherche sur la conduite autonome. L'un des premiers jalons posés sur ce parcours a été le projet de recherche EUREKA-PROMETHEUSs (« Program for European Traffic with Highest Efficiency and Unprecedented Safety ») lancé à l'initiative de Daimler-Benz dès
1986. Les véhicules d'essai utilisés dans ce contexte ont parcouru de manière déjà très autonome un millier de kilomètres sur une autoroute à plusieurs voies de la région parisienne dans des conditions de circulation normales.
L'office fédéral allemand de la circulation routière (BASt) et le groupe de travail mis en place par l'association des constructeurs
automobiles allemands (VDA) ont défini
trois niveaux de conduite autonome : partiellement, hautement et entièrement automatisée.
Dans le premier cas, le conducteur
doit constamment surveiller les fonctions automatiques et ne doit pas s'adonner à des activités autres que la conduite.
Dans le cas de la conduite hautement automatisée, il n'est plus contraint de surveiller sans cesse les fonctions et
peut se consacrer à un nombre limité d'activités ne relevant pas de la conduite. Le système détecte lui-même ses limites et rend les commandes au conducteur en temps utile, c'est-à-dire avec un temps de réaction suffisant.
La conduite est entièrement automatisée lorsque l
e système est en mesure de maîtriser toutes les situations de manière totalement autonome. Le conducteur n'a plus à le surveiller et peut s'intéresser à autre chose que la conduite. A ce niveau d'automatisation, la conduite sans conducteur devient possible.
Les conducteurs Mercedes-Benz disposent déjà de la conduite partiellement automatisée à bord des modèles Classe E et Classe S actuels. Le nouveau système Distronic Plus avec assistant directionnel et Stop & Go Pilot dirige le véhicule de manière quasi-automatique dans les embouteillages. Ce système est au cœur du concept « Mercedes-Benz Intelligent Drive » et de son multiplexage intelligent de tous les dispositifs de confort de sécurité dont la finalité est de se rapprocher le plus possible de la
vision d'une conduite sans accident, voire entièrement autonome.
Thomas Weber, membre du directoire de Daimler AG responsable Recherche du groupe et directeur Développement Mercedes-Benz Cars indique:
« Avec la nouvelle Classe S nous sommes les premiers à conduire autonome dans des embouteillages. Nous voulons être aussi les premiers qui proposent plus de fonctions de conduite autonome à bord de véhicules de série. Soyez assurés que nous y parviendrons au cours de cette décennie. »Pourtant,
de nombreux obstacles techniques restent à surmonter jusqu'à ce que la conduite hautement ou entièrement autonome devienne réalité, mais ce ne sont pas les seuls. De nombreux systèmes techniquement réalisables ne sont pas encore partout autorisés par la législation.
Ainsi, le
règlement international CEE-ONU R 79 (sur les systèmes de direction) n'autorise que des interventions correctrices de la direction, mais aucun guidage automatique au-delà de 10 km/h. La convention de Vienne sur la circulation routière, sur laquelle se fonde le droit de l'UE, prescrit que le conducteur doit contrôler son véhicule en permanence et être capable d'intervenir à tout moment. Les
véhicules autonomes étant encore inimaginables au moment de l'adoption de cette convention.
Le passage des systèmes partiellement automatisés aux dispositifs hautement automatisés est également conditionné pa
r l'acceptation sociale. Les nouveaux systèmes doivent gagner la confiance du grand public en apportant la preuve de leurs potentiels techniques.
Un autre aspect essentiel est
l'actualisation continue des données cartographiques et des informations sur les trajets. La communication entre les véhicules et avec leur environnement « Car-to-X » est l'une des approches envisageables dans ce domaine. Les véhicules communicants équipés des « fonctions Car-to-X » pourraient s'entraider à établir des cartes en temps réel.






























 Newsletter
Newsletter