La
conduite autonome sécurisée n'est possible qu'en
combinant le hardware, les logiciels et les services.
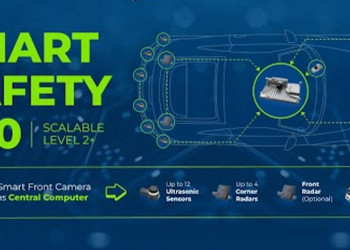
La conduite autonome ne se résume pas à des capteurs, des calculateurs et une grande puissance de calcul. Elle nécessite toute une série de
services de localisation sans lesquels aucun véhicule ne pourrait circuler de manière autonome en toute sécurité.
Les véhicules entièrement automatisés ne peuvent circuler en toute sécurité que s'ils
connaissent en permanence leur localisation précise, et cela de manière fiable et au centimètre près.
Le
système redondant Bosch associant le matériel, les logiciels et les services pour la localisation permet la détermination précise de la position du véhicule autonome.
Le
capteur de mouvement et de position Bosch permet une autolocalisation précise des véhicules automatisés.
Le capteur dispose entre autres d'une
unité réceptrice pour les signaux du système de positionnement par satellites (GNSS), qui sont nécessaires à la détermination de la position absolue d'une
voiture automatisée.
Les signaux de position GNSS, les données de correction et les informations provenant des capteurs inertiels, des capteurs de vitesse de roue et du capteur d'angle de braquage sont regroupés au sein du capteur de mouvement et de position Bosch.
Mais ces informations ne suffisent pas à elles seules à localiser avec précision les véhicules automatisés.
Le
traitement des informations avec un logiciel intelligent permet une localisation très précise, à laquelle un véhicule automatisé peut se fier au sein d'une zone de quelques mètres et calculer ses manœuvres de conduite en conséquence.
Le véhicule automatisé est localisé en premier lieu sur la
base des signaux GNSS corrigés. En cas d'interruption de la liaison par satellite, lorsque la voiture entre dans un tunnel par exemple, le capteur de mouvement et de position peut poursuivre la détermination de la position du véhicule automatisé pendant quelques secondes. Cela nécessite de
calculer la position relative du véhicule à partir de la dernière information de position absolue connue.
Si le signal GNSS est interrompu pendant une durée assez longue et s'il n'est plus possible de déterminer la position à l'aide du capteur de mouvement et de position, la voiture automatisée peut continuer à utiliser la
signature routière de Bosch, qui constitue une information de localisation précise.
La signature routière de Bosch est un
service de localisation cartographique basé sur les capteurs d'environnement des véhicules.
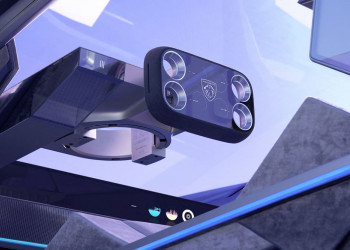
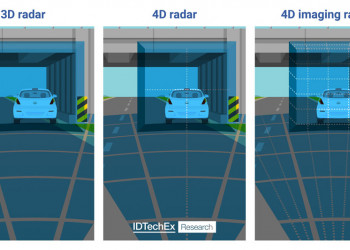
Des
capteurs vidéo et radar embarqués à bord des
voitures détectent les éléments fixes présents sur la route et ses abords, tels que les marquages au sol, panneaux de signalisation ou glissières de sécurité.
Contrairement aux caméras, les capteurs radar peuvent identifier les caractéristiques de la route
même dans l'obscurité ou par mauvaise visibilité et leur distance de détection est importante.
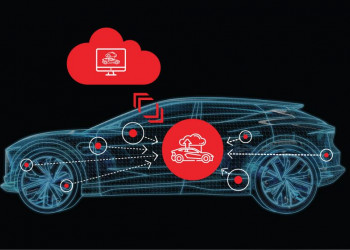
Via un module de communication embarqué, les informations sur les caractéristiques de la route et de ses abords sont transmises au cloud, où une couche cartographique indépendante est générée avec ces caractéristiques. Cette couche constitue l'un des éléments d'une carte de haute précision.
Les
véhicules automatisés identifient à leur tour les caractéristiques de la route et effectuent une comparaison pour déterminer si les panneaux de signalisation ou glissières de sécurité qu'ils ont identifiés correspondent à ceux de la carte. Cette comparaison permet aux voitures de se localiser dans leur voie de circulation par rapport à une carte de grande précision, et cela au centimètre près.
La signature routière de Bosch
fonctionne en parallèle à la solution de localisation par satellite basée sur le capteur de mouvement et de position.

























 Newsletter
Newsletter